




Принцип роботи та класифікація магнітних підшипників
Магнітний підшипникСистеми можна розділити на три категорії відповідно до принципів їхньої роботи: активний магнітний підшипник, пасивний магнітний підшипник та гібридний магнітний підшипник.
Активний магнітний підшипник
Активні магнітні підшипники використовують керовану електромагнітну силу для левітації обертового вала, який в основному складається з роторів, соленоїдів, датчиків, контролерів та підсилювачів потужності. Соленоїди встановлені на статорі, підвішеному в магнітному полі, що генерується електромагнітами, розташованими радіально симетрично, кожен з яких оснащений одним або кількома датчиками для постійного контролю змін положення вала. Сигнал, що виводиться з датчика, за допомогою електронної системи керування коригує струм через електромагніт, щоб контролювати притягання електромагніту, завдяки чому обертовий вал працює в стабільному та збалансованому стані та досягає певних вимог до точності.
Активні магнітні підшипники можна розділити на підшипники з керуванням струмом та підшипники з керуванням напругою відповідно до різних методів керування, а також на радіальні магнітні підшипники та осьові магнітні підшипники відповідно до різних методів опори. Наразі серед активних магнітних підшипників найбільш широко використовуються магнітні підшипники з керуванням постійним струмом.
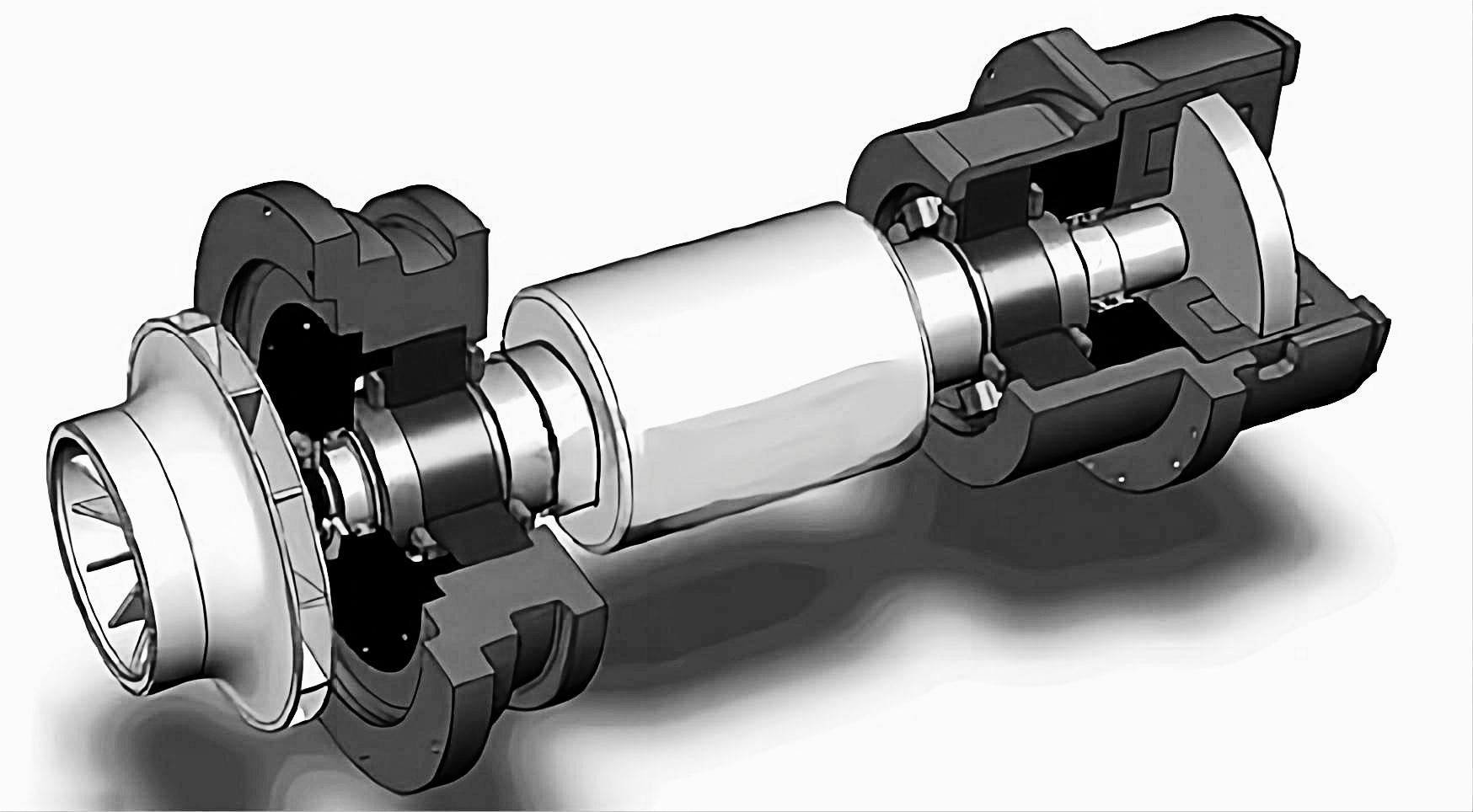
Механічна частина активного магнітного підшипника зазвичай складається з радіального підшипника та осьового підшипника, а радіальний підшипник складається зі статора (електромагніту) та ротора; осьові підшипники складаються зі статора (електромагніту) та упорної пластини.
Оскільки активний магнітний підшипник має переваги положення ротора, жорсткість підшипника та його демпфування можуть визначатися системою керування, він отримав найбільше поширення в галузі магнітної левітації, а дослідження активного магнітного підшипника завжди було в центрі уваги досліджень технології магнітної левітації. Після років наполегливої роботи його теорія та методи проектування стали дедалі більш зрілими.
Пасивний магнітний підшипник
Як різновид магнітного підшипника, пасивний магнітний підшипник має свої унікальні переваги: він невеликий за розміром, не споживає багато енергії та має просту конструкцію. Найбільша відмінність між пасивними магнітними підшипниками та активними магнітними підшипниками полягає в тому, що перші не мають активної електронної системи керування, а використовують характеристики самого магнітного поля для левітації обертового вала. Наразі найпоширенішими пасивними магнітними підшипниками є підшипники з постійними магнітами, що складаються з постійних магнітів. Підшипники з постійними магнітами можна розділити на два типи: відштовхувального типу та всмоктувального типу.
Пасивні підшипники з постійними магнітами можуть використовуватися як радіальні, так і наполегливі (осьові) підшипники, обидва з яких можуть бути всмоктуючими або відштовхувальними. Залежно від напрямку намагнічування та відносного положення магнітного кільця, підшипники з постійними магнітами мають різні структури магнітних ланцюгів. Але існує дві основні структури.
Інший тип пасивного магнітного підшипника базується на силі всмоктування, яка діє між намагніченими м'якими магнітними компонентами. Коли компонент ротора рухається радіально, ефект всмоктування виникає через зміну магнітоопору, тому його також називають "магніторезистивним підшипником". Цей тип підшипника може бути сконструйований таким чином, що частина з постійним магнітом не обертається, а обертається лише частина з м'якого заліза, що забезпечує кращу стійкість системи.
Поєднання стабілізуючих ефектів реактивних підшипників та активних соленоїдів призводить до створення магнітної підшипникової системи з мінімальним споживанням енергії.
Гібридні магнітні підшипники
Гібридні магнітні підшипники формуються на основі активних магнітних підшипників, пасивних магнітних підшипників та деяких інших допоміжних опорних та стабілізуючих конструкцій - своєрідна комбінована система магнітних підшипників. Вона враховує комплексні характеристики активних магнітних підшипників та пасивних магнітних підшипників.
Гібридний магнітний підшипник використовує магнітне поле, що генерується постійним магнітом, для заміни статичного магнітного поля зміщення електромагніту, що може не тільки значно зменшити споживання енергії підсилювачем потужності, але й зменшити кількість ампер-оборотів електромагніту вдвічі, зменшити об'єм магнітного підшипника та покращити несучу здатність.
Оскільки магнітне поле зміщення генерується постійним магнітом, а кероване магнітне поле генерується електромагнітом, гібридні магнітні підшипники з постійним магнітом та офсетом мають такі переваги:
1) Постійний магніт використовується для забезпечення статичного магнітного поля зміщення, а електромагніт забезпечує лише керуюче магнітне поле для балансування навантаження або зовнішніх перешкод, що може уникнути втрат потужності, спричинених струмом зміщення системи, та зменшити нагрівання котушки.
2) Кількість витків, необхідних для електромагніту гібридного магнітного підшипника, значно менша, ніж для активного магнітного підшипника, що сприяє зменшенню об'єму магнітного підшипника та економії матеріалів. Цей тип підшипника має переваги малого розміру, легкої ваги та високої ефективності, і підходить для мініатюризації та малогабаритних застосувань.
Час публікації: 19 лютого 2025 р.



